
.jpg)



立即了解更多信息
MATCH 是施迈茨和齐玛尔集团两家搬运专家为机器人设计的新型多功能臂端平台的恰当名称。MATCH 配备了广泛的功能组合和通用通信接口,可与任何轻型机器人、cobot 和市场上所有传统的六轴机器人兼容。
通过新的 MATCH 平台,施迈茨和齐玛尔集团将两个抓取世界的精华结合在一起。并由此产生了一些独特的东西:一个模块化系统,客户可以用它灵活地实现机器人技术中的各种需求和应用。此外,除了集中的解决方案专业知识,两家公司还在全球范围内建立了销售网点,为客户提供支持和服务。
适用于任何普通轻型机器——是COBOT和传统六轴机器人的理想系统。
通过快速连接器进行机械连接,并通过设置向导进行参数化。
适用于任何机器人,任何抓手以及任何末端执行器。可灵活组合,灵活性高。
捕获、评估数据并将数据可视化,可连接云端系统。
您的个性化配置
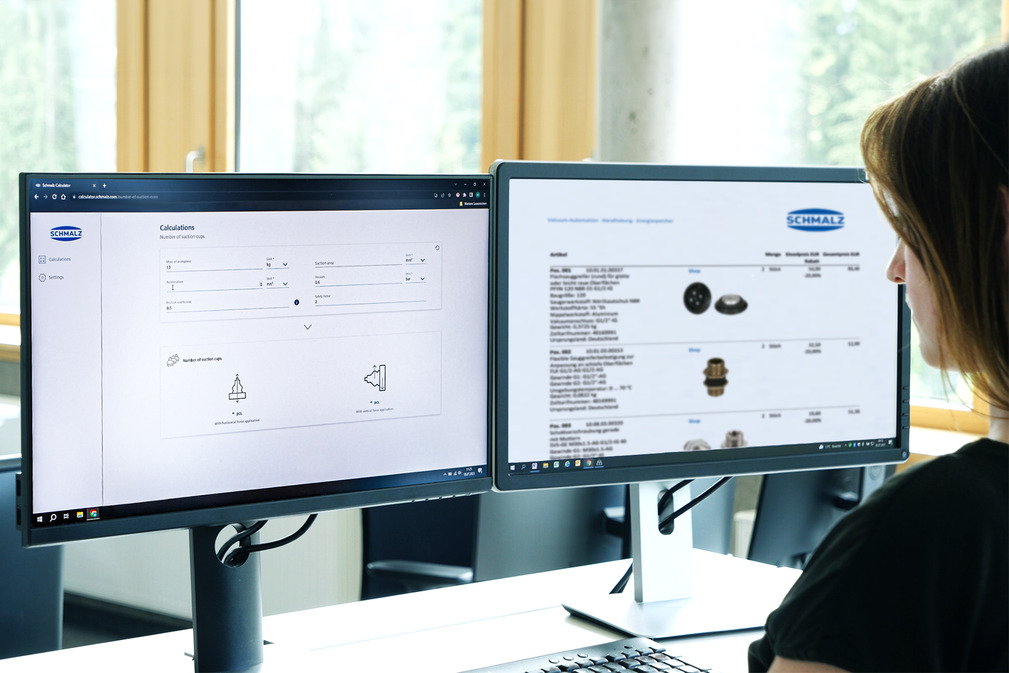
臂端生态系统 MATCH 具有完全根据您的需求设计搬运工艺的灵活性。借助创新的配置器,我们的销售工作人员可以在短时间内为您定制解决方案。
除了为您的个性化产品系列提供报价外,您还将收到一份 CAD 模型。
现在就申请您的个性化配置并联系我们!
产品代码
与零件编号类似,产品代码用于唯一标识施迈茨的产品配置。产品代码可以在产品标签或报价单或订单上找到。您是否对您的产品有疑问或想再次订购配置?请在联系施迈茨公司时准备好这把钥匙。
| 代码 | 类型 |
|---|---|
| MATCH | MATCH |
| 代码 | 类型 |
|---|---|
| M | RMQC(如果未配置 RMQC,可省略) |
| 代码 | 类型 |
|---|---|
| IOL | IO-Link |
| SIO | 数字输入/输出 |
| RS485 接口 | RS485 接口 |
| 代码 | 类型 |
|---|---|
| 针数 + T | 配置的 MATCH 抓具数量 |
| 代码 | 类型 |
|---|---|
| ABC00001C | 单独配置代码 |

自动快速更换功能
无需外部安装控制,即可在存储站或抓具站自动进行元器件变化。

操作手册快速更换功能
由于要更换的末端效应器中集成了符合人体工程学的点击系统,因此只需单手即可完成元器件的手动更换。
电动的接口
快换系统具有热插头性能,可在操作过程中在电压下更换。集成引脚场可同时传输负载电流和信号电流。

气动/真空接口
四个内部流体通道和两个横向流体通道为连接的抓具系统提供压缩空气或真空。宽大的尺寸可以操作大功率气动真空产生装置,例如去吸取纸板箱。
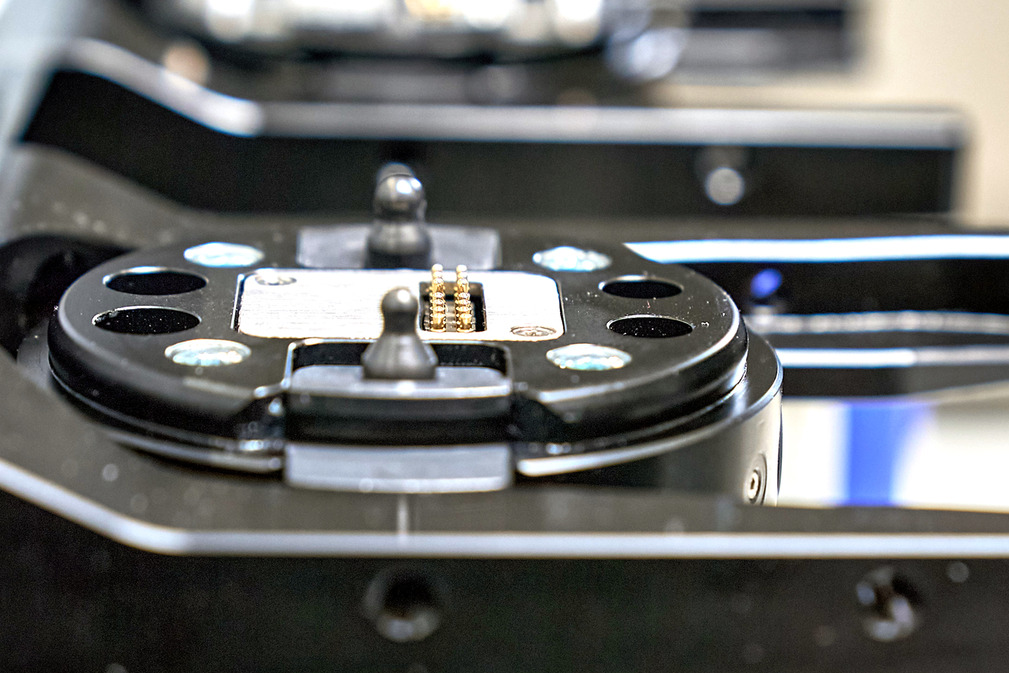
机械的接口
高生产率保证了较长的使用寿命(> 100,000 次)。防翻转装置,设备可确认松动部件相对于固定部件的明确位置和末端效应器在沉积工位的明确对齐。
.jpg)
MATCH 的安装极为简单。只需几个步骤,就能在机器人法兰上方便地安装和设置系统。得益于带有智能通信模块和实用数字服务的通用生态系统的支持,从控制(专家模式、引导设置、装置监控和舒适性应用程序)到通过Schmalz Connect Suite直观轻松地进行云连接,参数设置都非常简单。



