机器人领域的真空技术
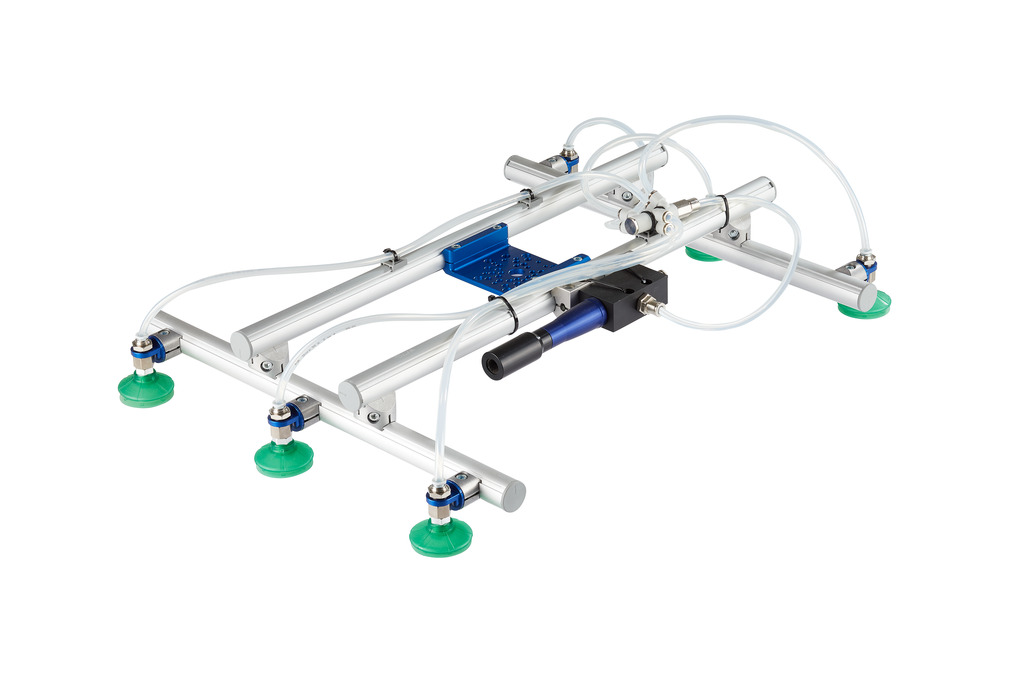
工业生产中机器人的中心化任务是抓取和移动物体。这里的核心元器件就是合适的抓具。在使用小型和协作机器人时,抓具必须满足特别的需求:它必须轻便、通用且易于集成。
施迈茨的机器人解决方案可用于装卸机器、订单拣选、托盘和卸垛或料仓拣选工艺。该方案包括标准化和可配置的终端效应器、抓具套件、视觉和搬运装置以及电动和气动真空产生装置。
我们的抓具解决方案可与所有常见的轻型机器人和协作机器人兼容,并作为现成的连接套件提供。配备用于双向数据交换的通信接口,具有处理过程的诊断功能,具有用于夹持点检测的视觉系统或用于自动更换抓具的生态系统,是整个系统的中心。
施迈茨机器人解决方案的特点是在抓取工艺中实现最高精度、安全性和工艺控制。