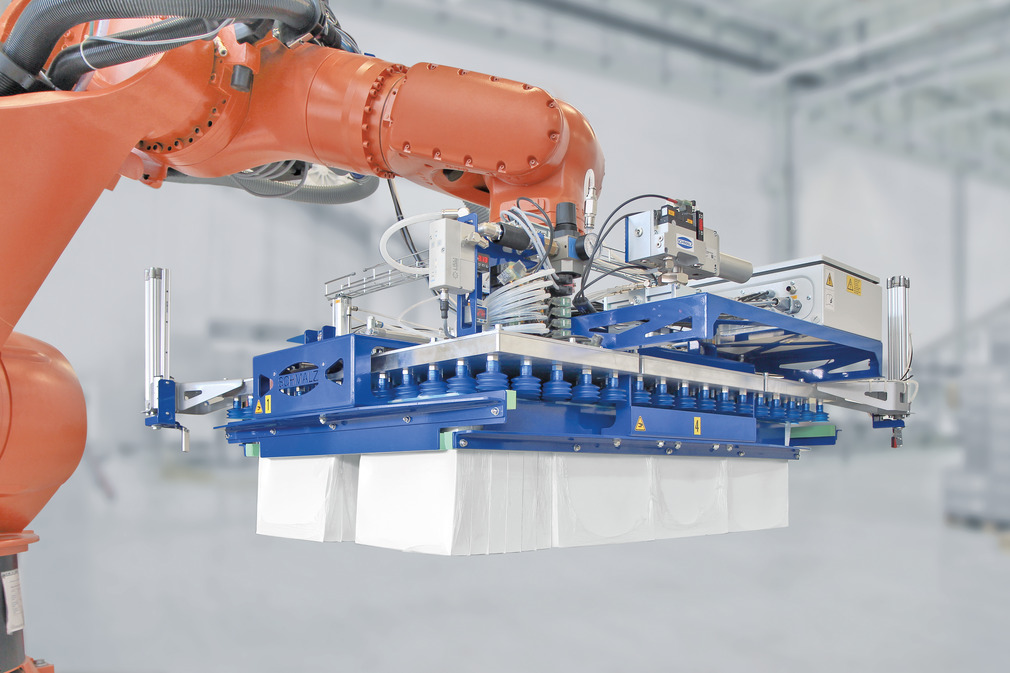
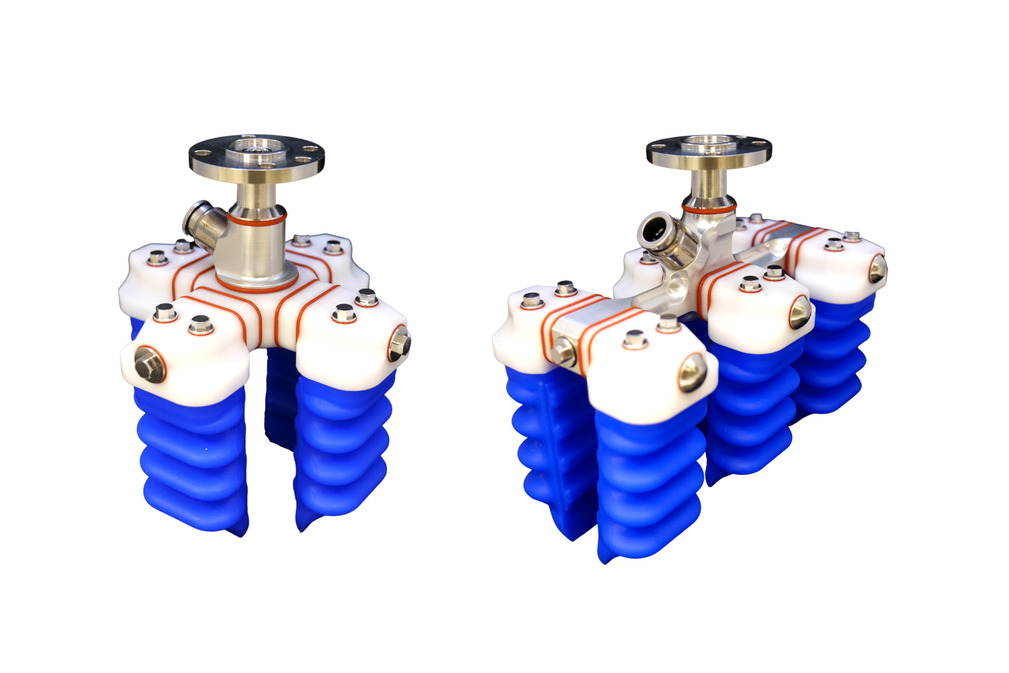
施迈茨与领先的机器人生产商合作,为客户量身定制 EOAT。我们的可以连接的抓具组是根据您的应用和生产工艺量身定制的,不仅包括抓具,还包括配套的法兰和连接电缆。




通过 EOAT,我们将机器人和工件连接起来,从而为自动化领域的生产效率、符合人体工程学设计和高效成本奠定了基础。∼ Maik Fiedler 博士(管理委员会成员和真空自动化业务模块负责人)
.jpg)
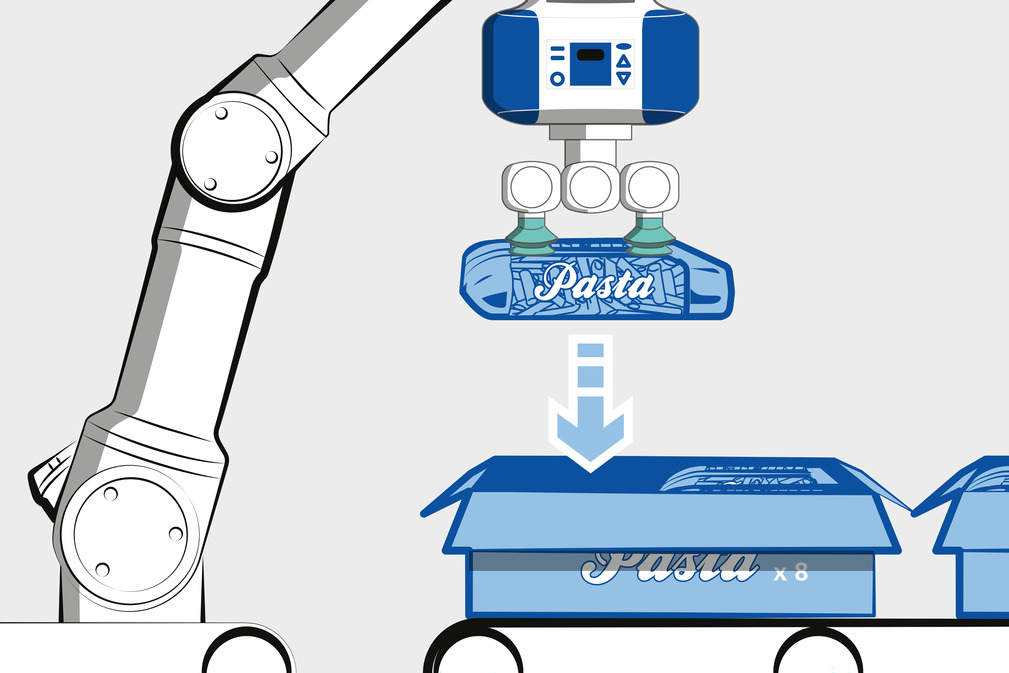
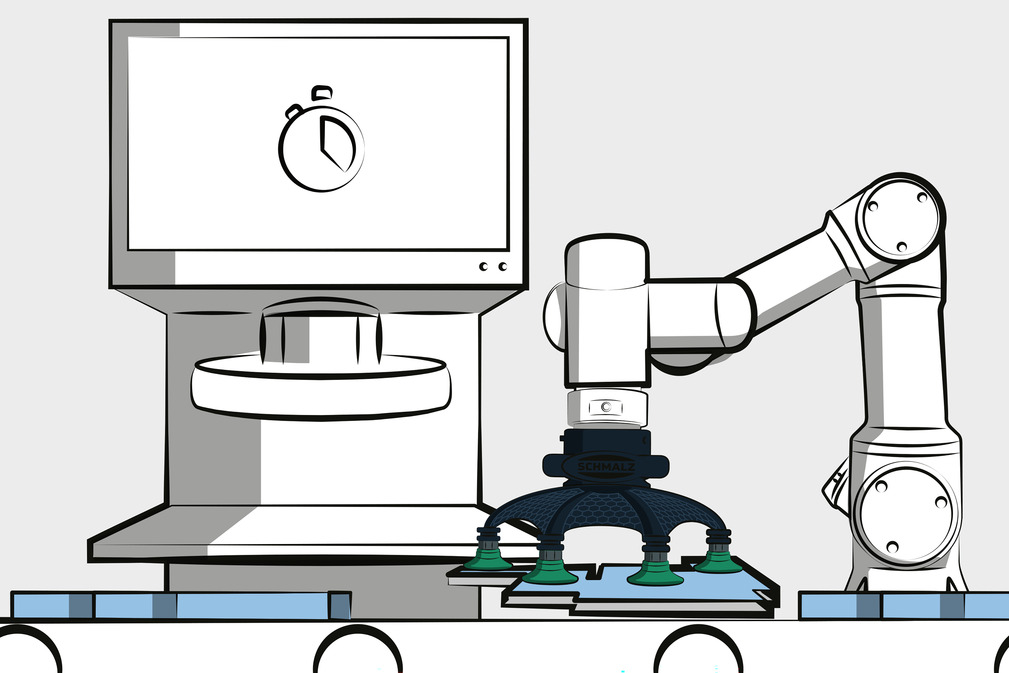
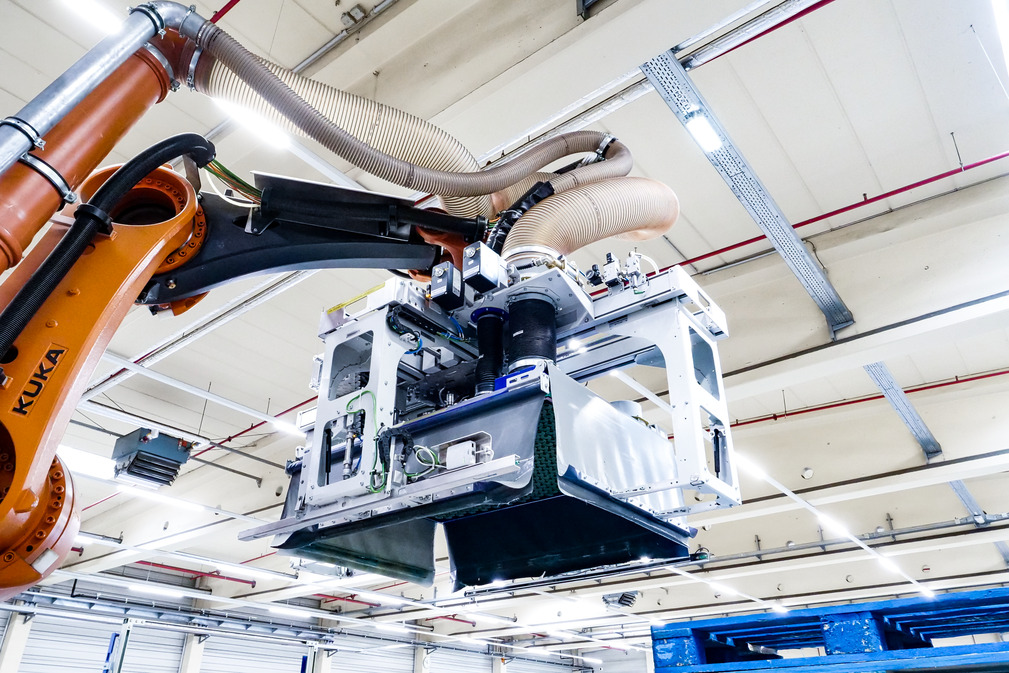
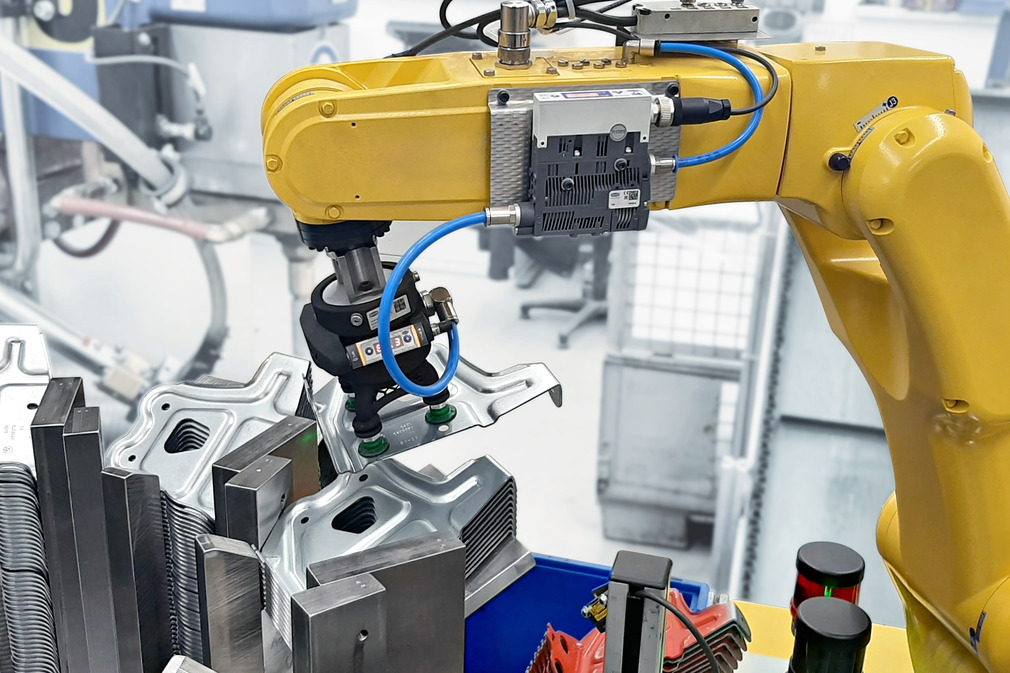
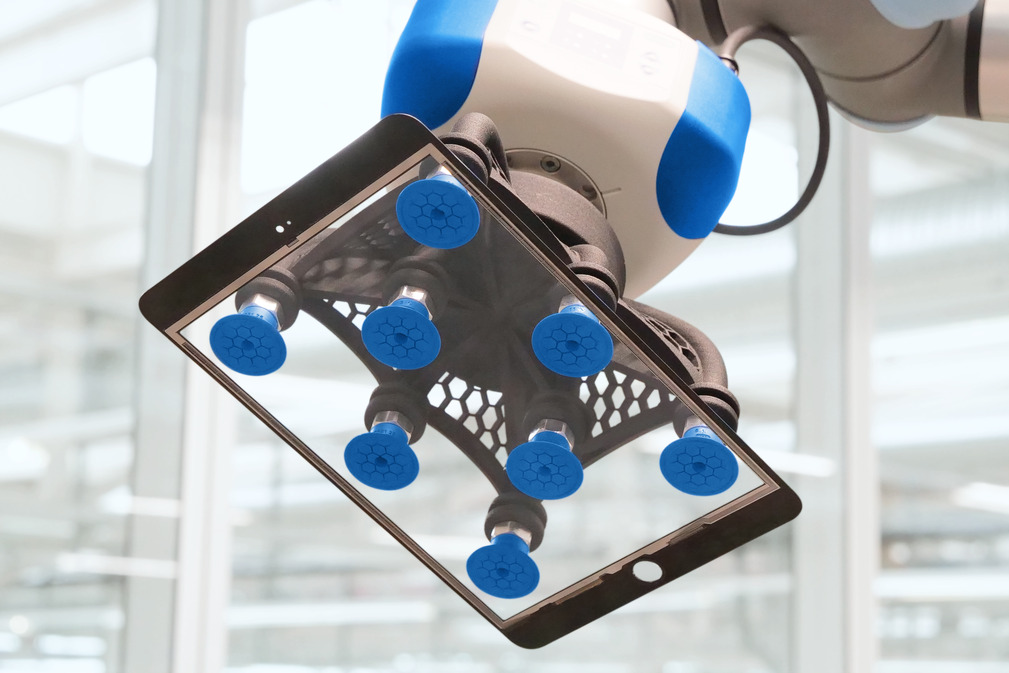
EOAT 系统由多个元器件组成,它们共同作用以确认工件的搬运。机器人 (1)作为底座和执行动作。机器人通过法兰 (2) 与真空产生装置 (3)连接,并产生必要的真空。下面是真空抓具 (4),这里以带吸盘的真空抓具 (5 ) 为例,可以牢牢地抓起工件 (5)。系统通过操作手柄 (6) 控制,而软件(应用程序) (7)则用于对系统进行编程和调整。
了解施迈茨抓具系统的实际应用视频。我们的 EOAT 解决方案通过实际应用来展示您如何可以高效地实现自动化应用和安全搬运各种工件。

对于需要应对不断变化的生产需求的公司来说,EOAT 解决方案的灵活性至关重要。真空抓具不局限于单项活动,可以通过多种方式适应于不同的应用和不同的工件。
无论您是想用真空、磁力还是机械的方式处理工件:施迈茨都可以为您的应用提供单独的元器件、可以连接的成套设备和完整的抓具系统。
我们的模块化解决方案可以快速集成到现有系统中,并可根据不同的批量尺寸进行扩展。从选择到初始操作,我们通过技术咨询和实际功能测试为您提供支持,以确认您的工艺可靠运行。














施迈茨的臂端工具(EOAT)能够精确和安全地实施智能自动化解决方案。将特定的真空元器件和抓具系统结合在一起,可形成高效的完整系统,为各种应用提供最大的灵活性。我们专注于功能强大和用户友好的真空技术,为您提供众多优势:
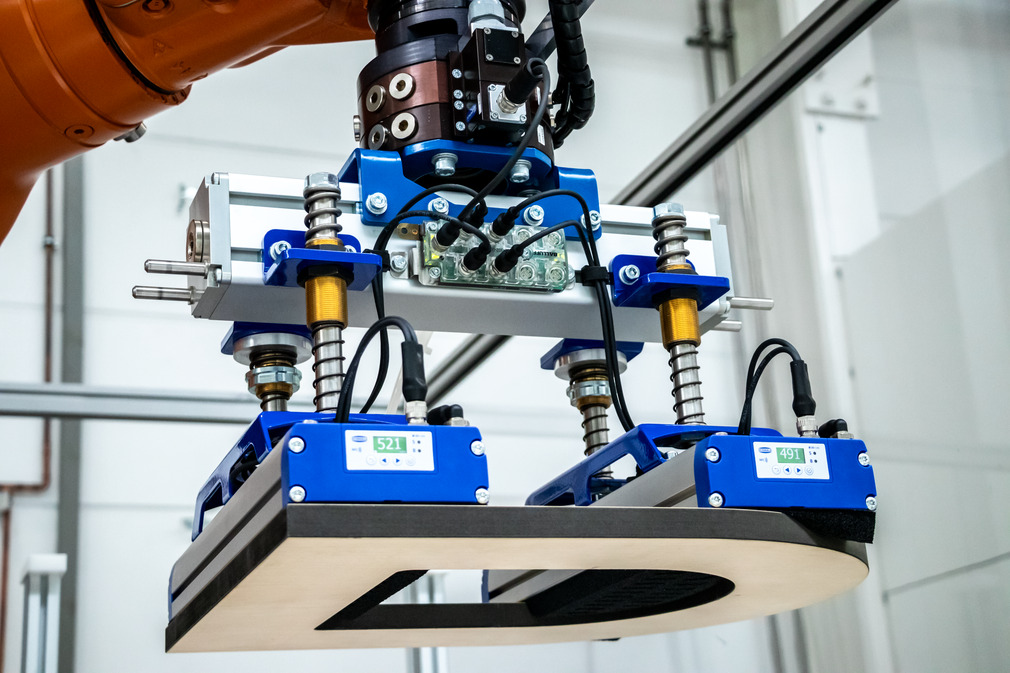
施迈茨的机器人解决方案可用于装卸机器、分拣、码垛和卸垛或分拣工艺。产品范围包括标准化和可配置的端拾器、模块化抓具系统、视觉和搬运系统以及电动和气动真空产生装置。
我们的抓具解决方案可与所有常见的轻型机器人和协作机器人兼容,并可以连接成套设备。抓具配有用于双向数据交换的通信接口、用于搬运工艺的诊断功能、用于抓取点检测的视觉系统或用于自动抓具变化的生态系统,在整个系统中发挥着中心化的作用。
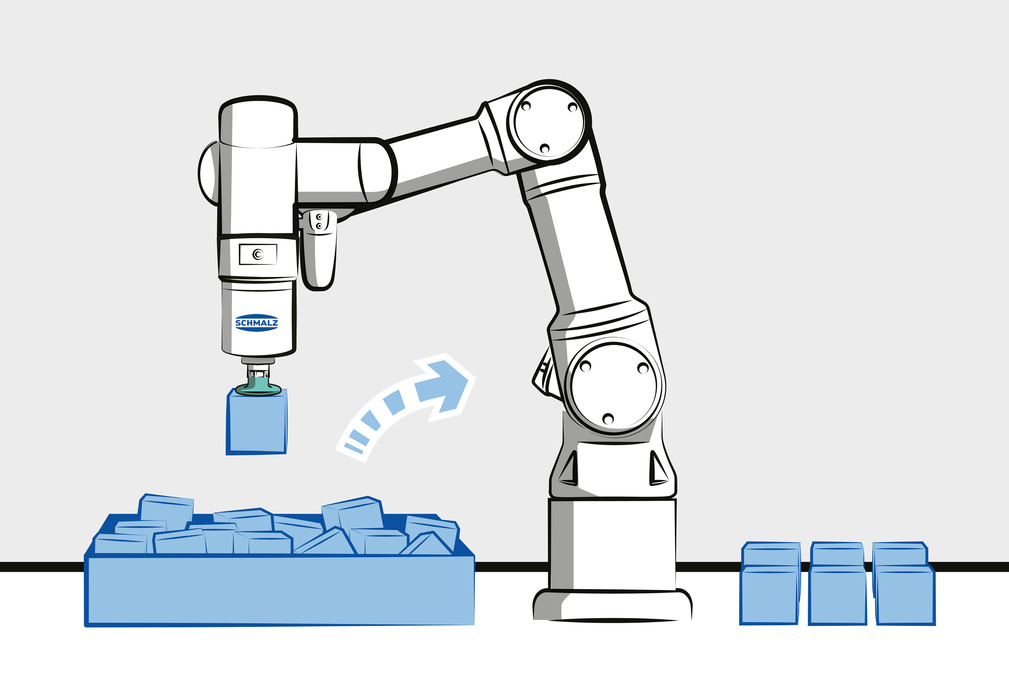
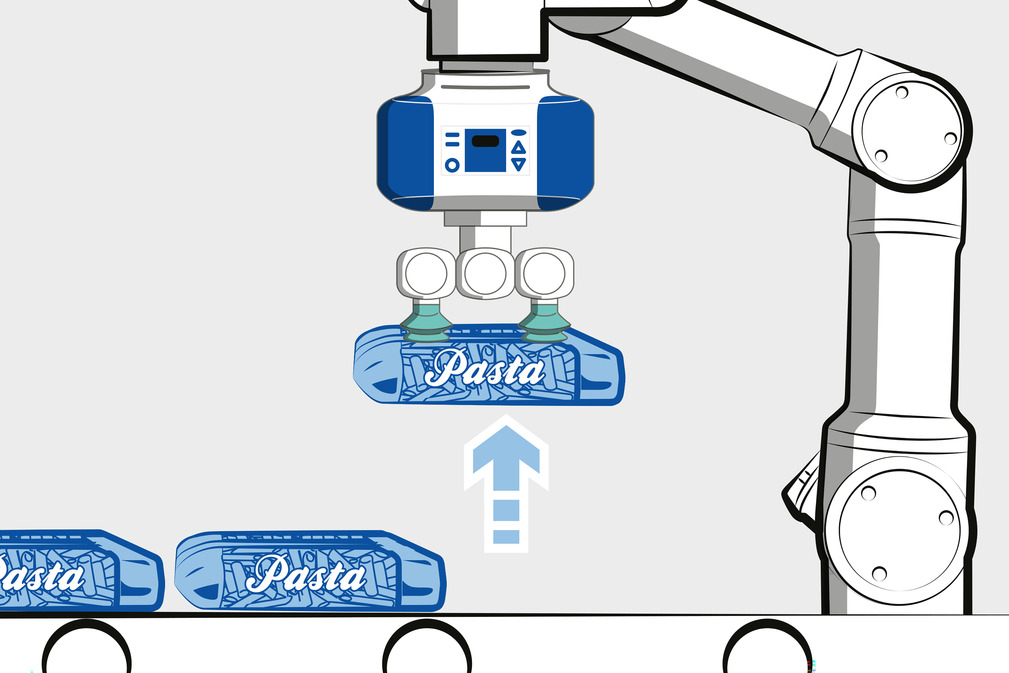
在这种搬运应用中,EOAT 接手了工件的分拣和放置工作。它从一个确定的地方分拣工件并将其放置在另一个同样确定的位置。
由于具有高精度和重复性,EOAT 可以全天候可靠地执行此类任务。可以方便地对重复任务进行编程、保存和随时检索。
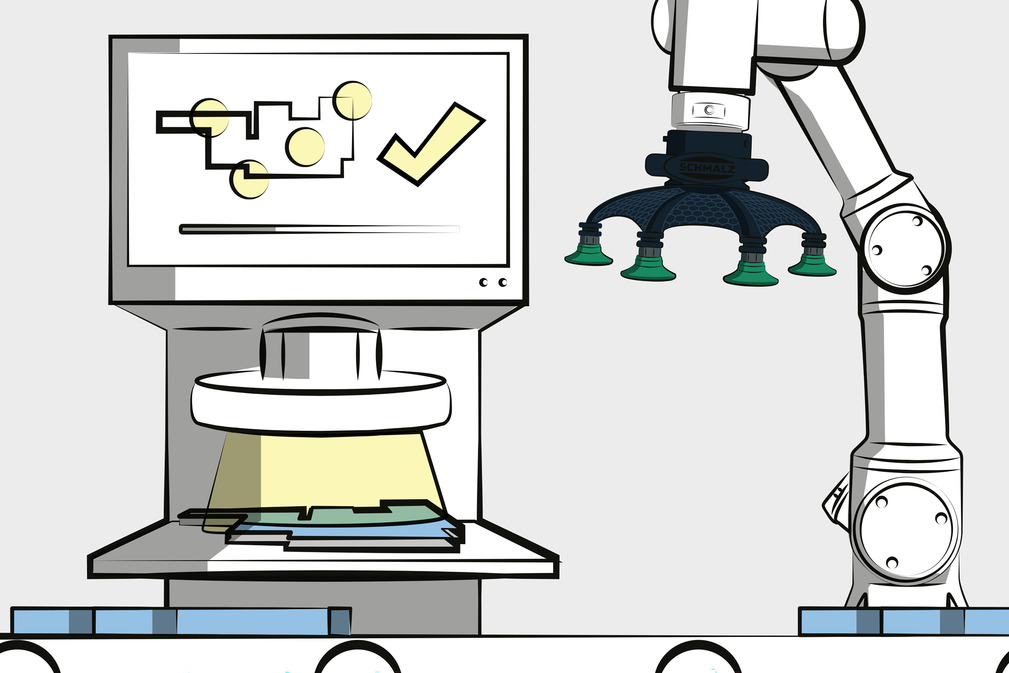
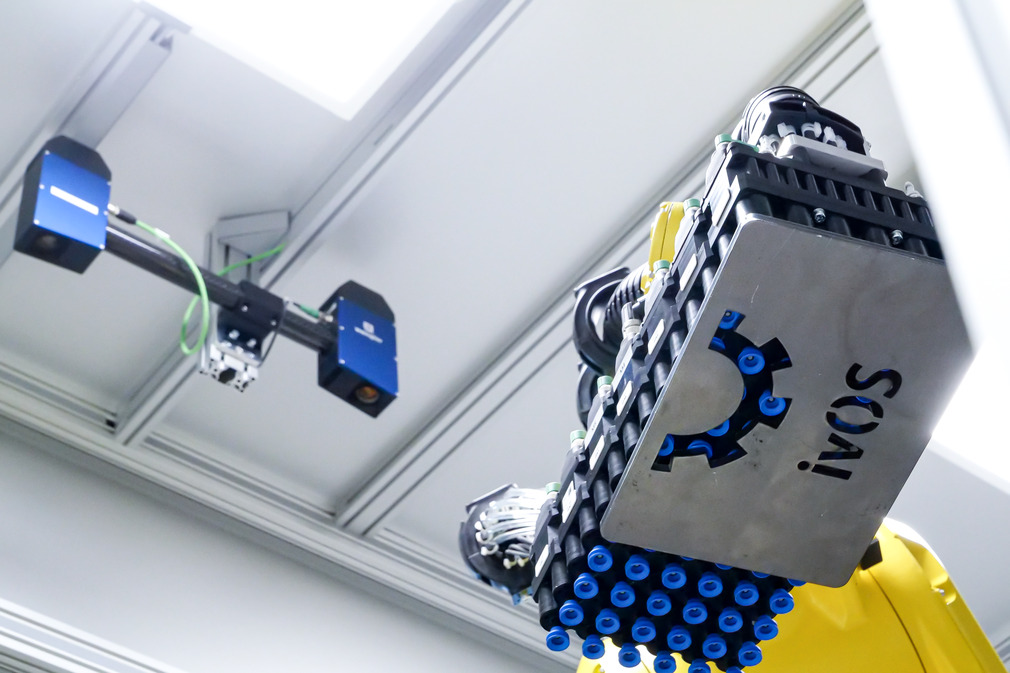
要求特别高的型号是所谓的 "分拣"。在这种情况下,摄像系统会识别相应的元器件,使 EOAT 能够独立地将其从料仓中取出。结合 cobot,这就为自动分拣和放置工艺提供了一个灵活的解决方案。
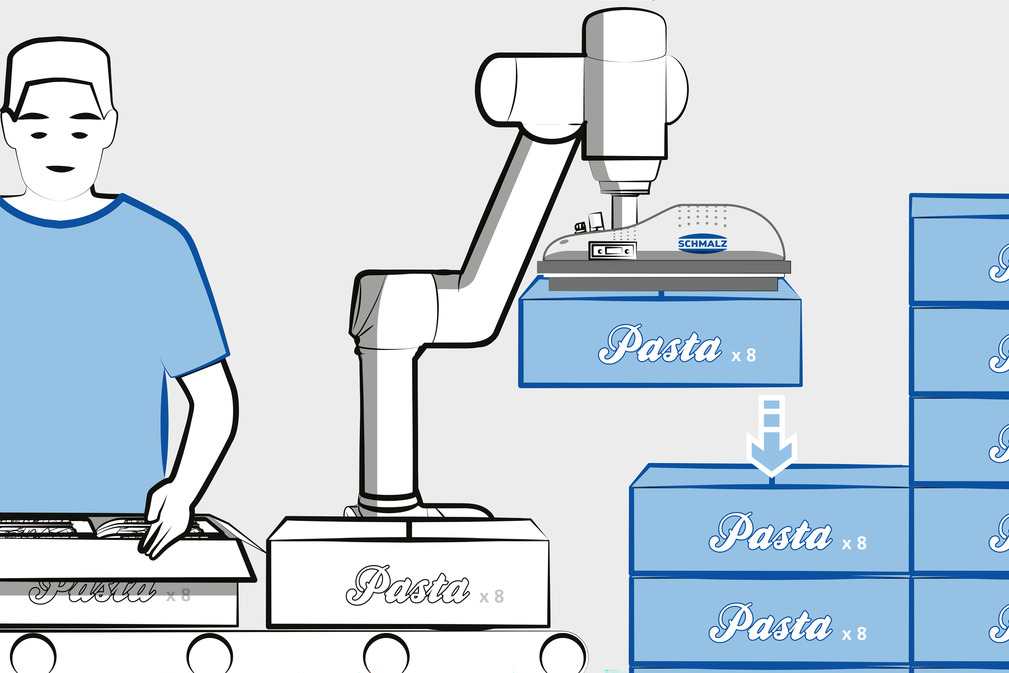
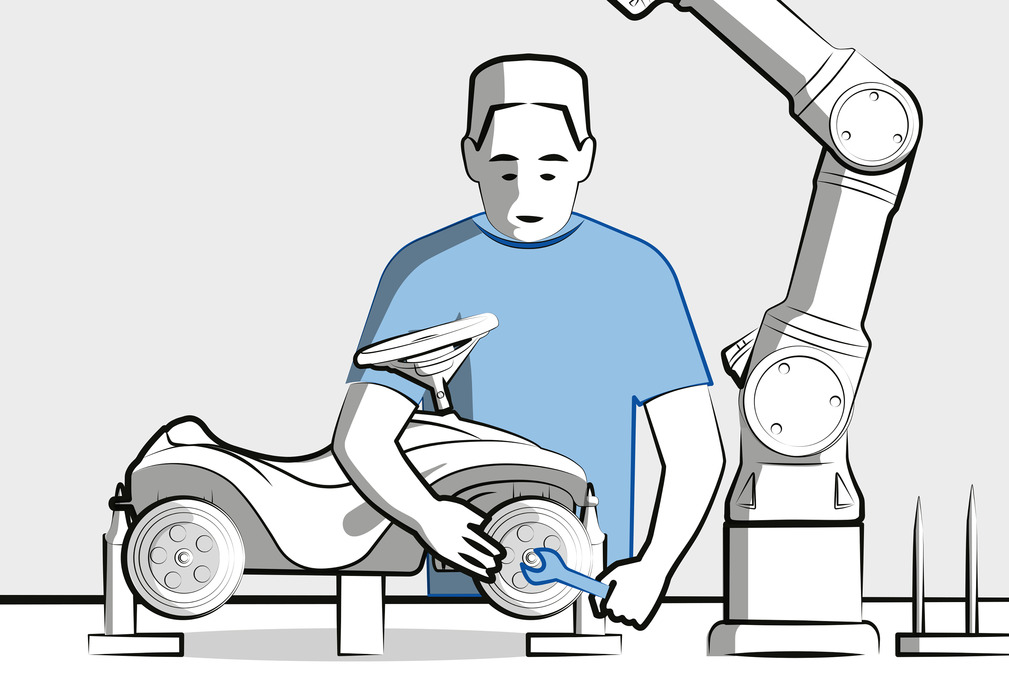
EOAT 系统通过自动完成单调的机械装载和卸载,为熟练员工提供了最佳的解脱方式。更重要的是,由于配备 EOAT 的协作机器人是随时可用的,可以昼夜操作,因此机器的闲置时间大大减少。一旦工艺完成,EOAT 就会立即卸载机器和重新装载新的零件。为此,Cobot 不需要太多空间,而操作手柄仍然可以操作机器。EOAT 系统配备真空抓具,具有超强的灵活性,可以跨不同的机器搬运各种工件。
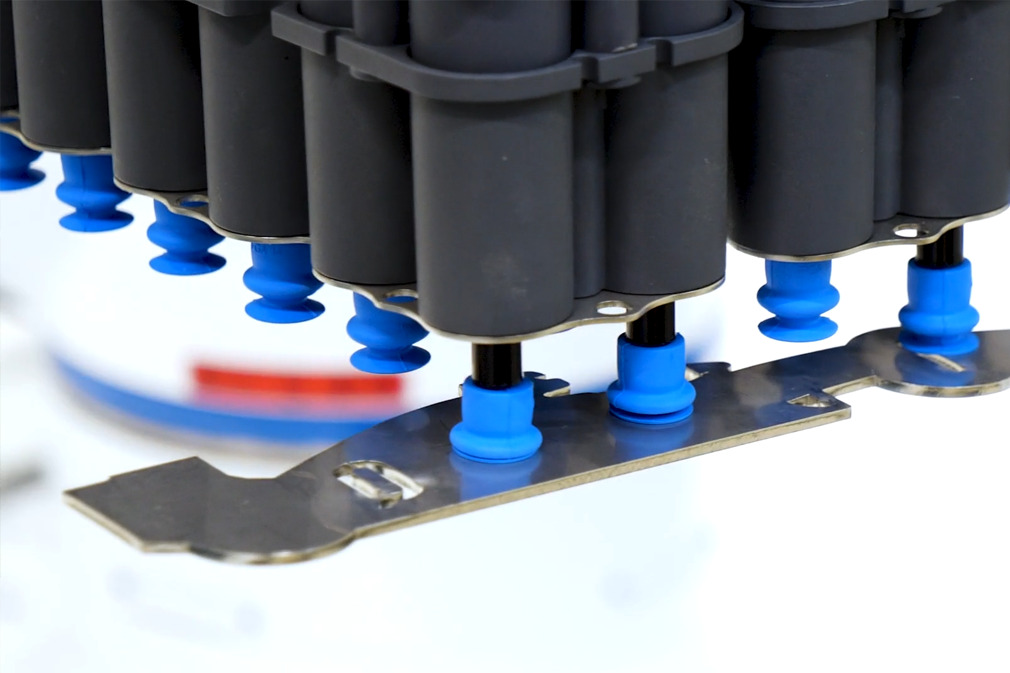
即使是软的、易碎的材料和不规则形状,真空抓具也能安全、轻柔地移动。一旦保存了产品数量和相应的目标位置,零件就会被系统地放置,直到装满纸箱。包装完成的部件会按照人工指定的位置整齐地堆放在托盘上。
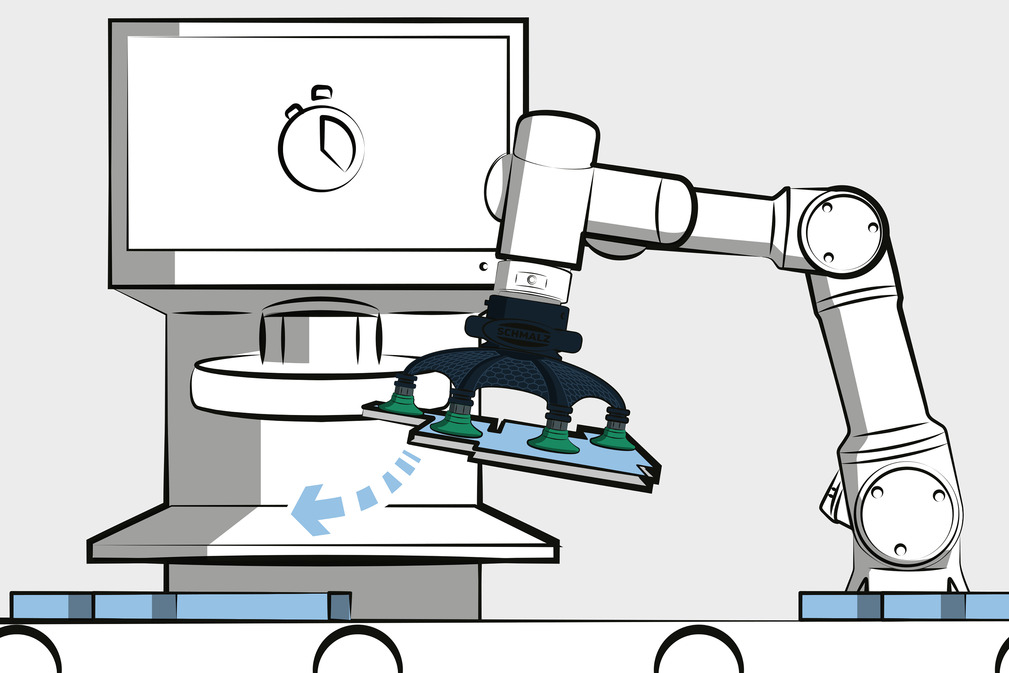
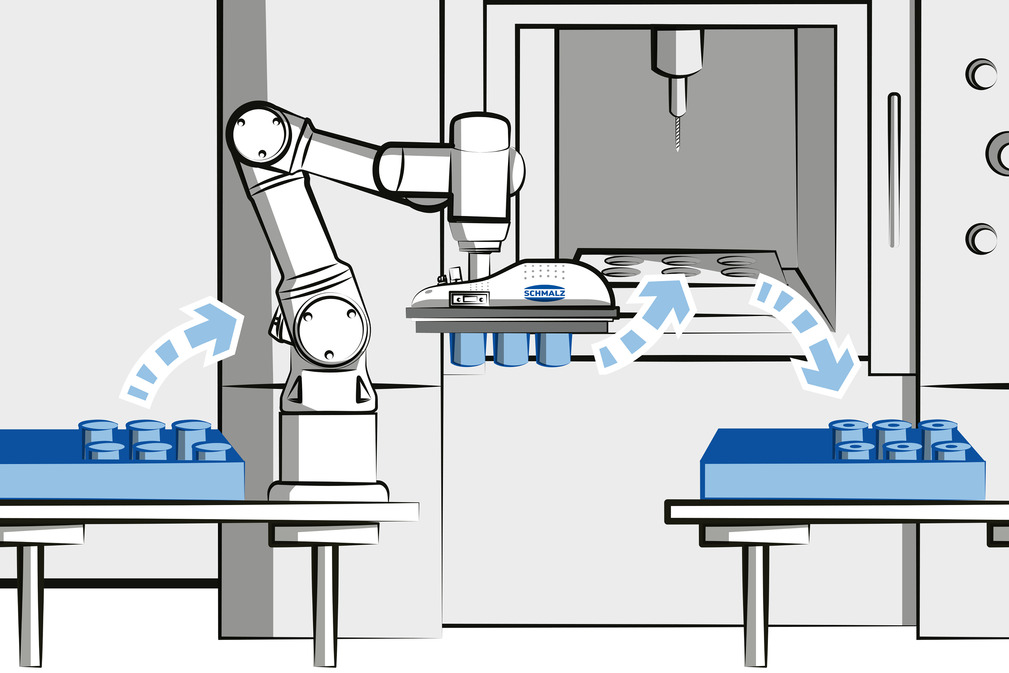
EOAT 的真空抓具在处理零件时尽量减少痕迹,并将其精确定位在指定位置,以便进行分析或检测工艺。零件由机械的检测或工艺处理。工艺完成后,会通知 cobot。在检测工艺过程中,cobot 会收到一个信号,指示被检测的零件是否应转送进一步加工或分拣。
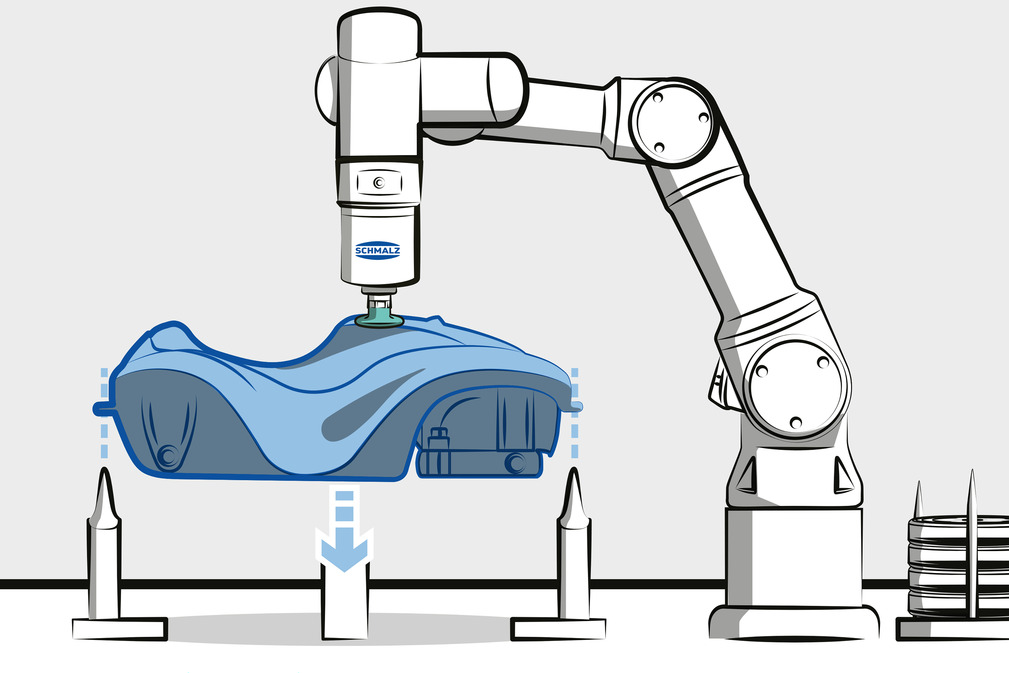
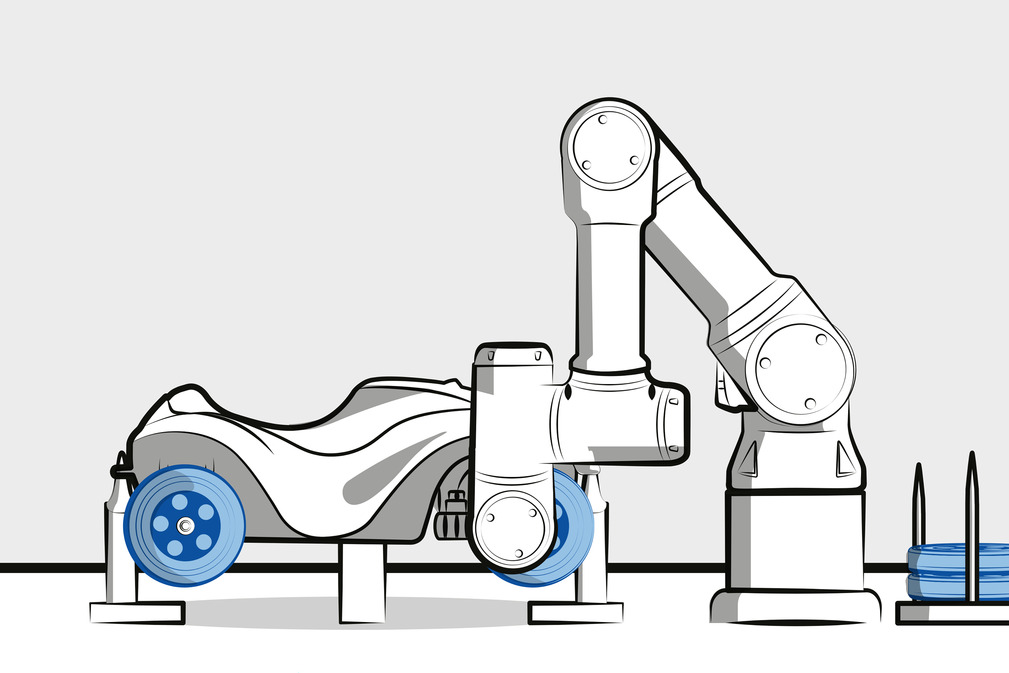
EOAT 的真空抓具从上方分拣和可靠地将工件放置到所需位置。各个元器件被一个接一个地抓取和组装。保存后,可以根据需求多次重复工作步骤。如果没有空间分离器,真空抓具就会接管单调的工作。人类对工艺进行监测、控制和监督。

805室
阳光商业广场
高科东路777号
201210浦东
上海























.jpg)